
Canadarm2's data sheet

| Technical name | Space Station Remote Manipulator System (SSRMS) |
|---|---|
| Launch date | Canadarm2 was launched aboard Space Shuttle Endeavour on April 19, 2001. Three days later, Canadian astronaut Chris Hadfield and NASA astronaut Scott Parazynski attached the robotic arm to the International Space Station (ISS). |
| Mission |
|
| Location | Approximately 400 km above Earth, on the ISS. |
| Ownership | Canadian Space Agency |
| Built by | MacDonald, Dettwiler and Associates Ltd. in Brampton, Ontario |
| Length | 17 m |
| Mass | 1,497 kg |
| Composition | 19 layers of high-strength carbon thermoplastic fibres |
| Degrees of freedom |
Seven degrees of freedom, making it very similar to a human arm:
|
| Fast facts |
Along with Canadian astronaut Chris Hadfield, Canadarm2 was pictured on a coin, available in gold or silver, created in 2006 by the Royal Canadian Mint. The robotic arm was also featured on a 2011 stamp issued by Canada Post. Since 2013, Canadarm2 and Dextre have adorned the new $5 polymer banknotes, highlighting Canada's great achievements in space exploration. |
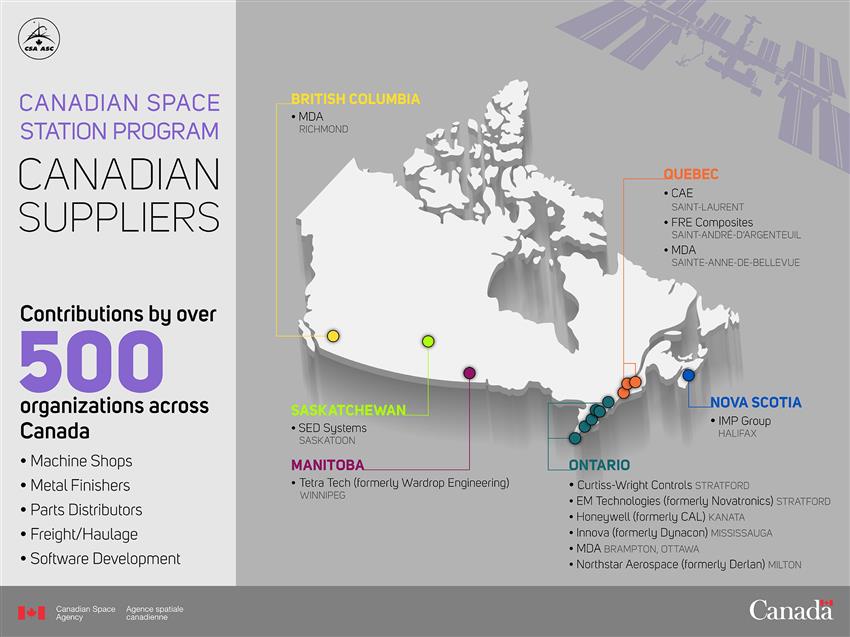
Text version of infographic Canadian Space Station Program – Canadian suppliers
Infographic indicating some of the over 500 organizations in Canada that were involved in the development of the Canadian Space Station Program. (Credit: Canadian Space Agency)