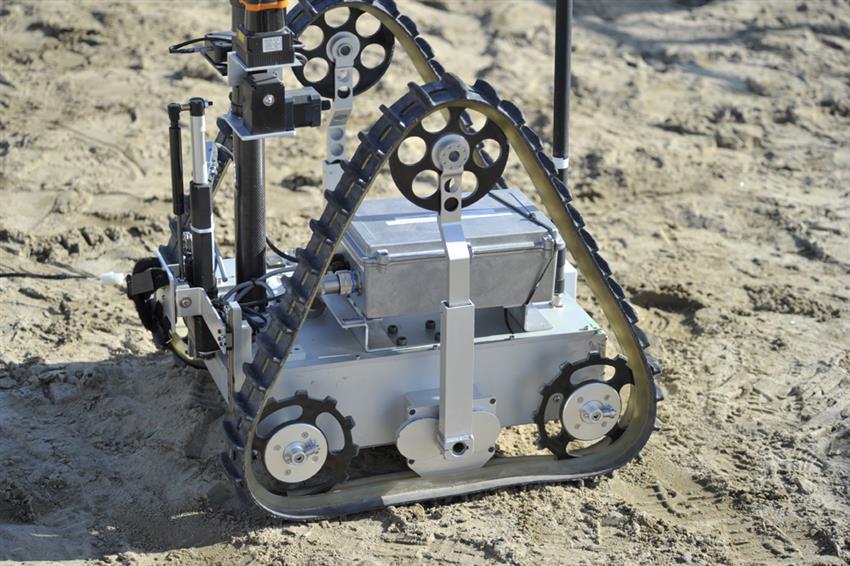
MRPTA - Micro-Rover Platform with Tooling Arm

One of the Canadian Space Agency's two micro-rovers with a tooling arm that can be used for science or as a helper robot for an astronaut or a larger rover.
Technical details
| Target destination | Moon or Mars |
|---|---|
| Size (Length, width, height) | 0.61 m x 0.51 m x 0.61 m |
| Mass | 30 kg |
| Speed | 0.07 km/h at top speed |
| Powered by | Electrical power, rechargeable batteries |
Highlights
- This pint-sized rover's special talent is its ability to travel over rough terrain using a system of wheels or tracks, and can even raise or lower its centre of gravity for increased stability
- Like Kapvik, it can be used to investigate tight spaces where humans or larger rovers can't fit
- Its navigation system allows it to be controlled remotely by a human operator, but the rover can also navigate on its own or in collaboration to work with a larger rover
Built by
Engineering Services Inc. (ESI).
Partners
Cohort Systems Inc (formerly Frontline Robotics), York University.