
Predictive visual servoing for robotic capturing and stabilizing uncooperative tumbling space objects
Background
On-orbit servicing using a space manipulator has been proposed by several national and international government agencies and commercial bodies for repairing, rescuing, refueling and removal of defunct satellites. A similar concept is envisioned for all robotic servicing missions and entails a robotic arm capturing a target satellite in a safe and secure manner given several operational and environmental constraints. Target satellites have often tumbling motion, resulting in increased complexity of robotic capturing operation. Robotic capturing of a tumbling target has not been attempted yet, though several missions for free-flying capture using a robotic arm on-orbit have so far been demonstrated.
Advantages
- Safe & secure capture
- Tumbling prediction
- Minimizes impact at the time of rendezvous
- Optimal point of rendezvous for collision avoidance
- Time-optimal de-tumbling maneuver given force/moment constraint
- Robust with respect to visual occlusion
- Proven ground testing success
The technology
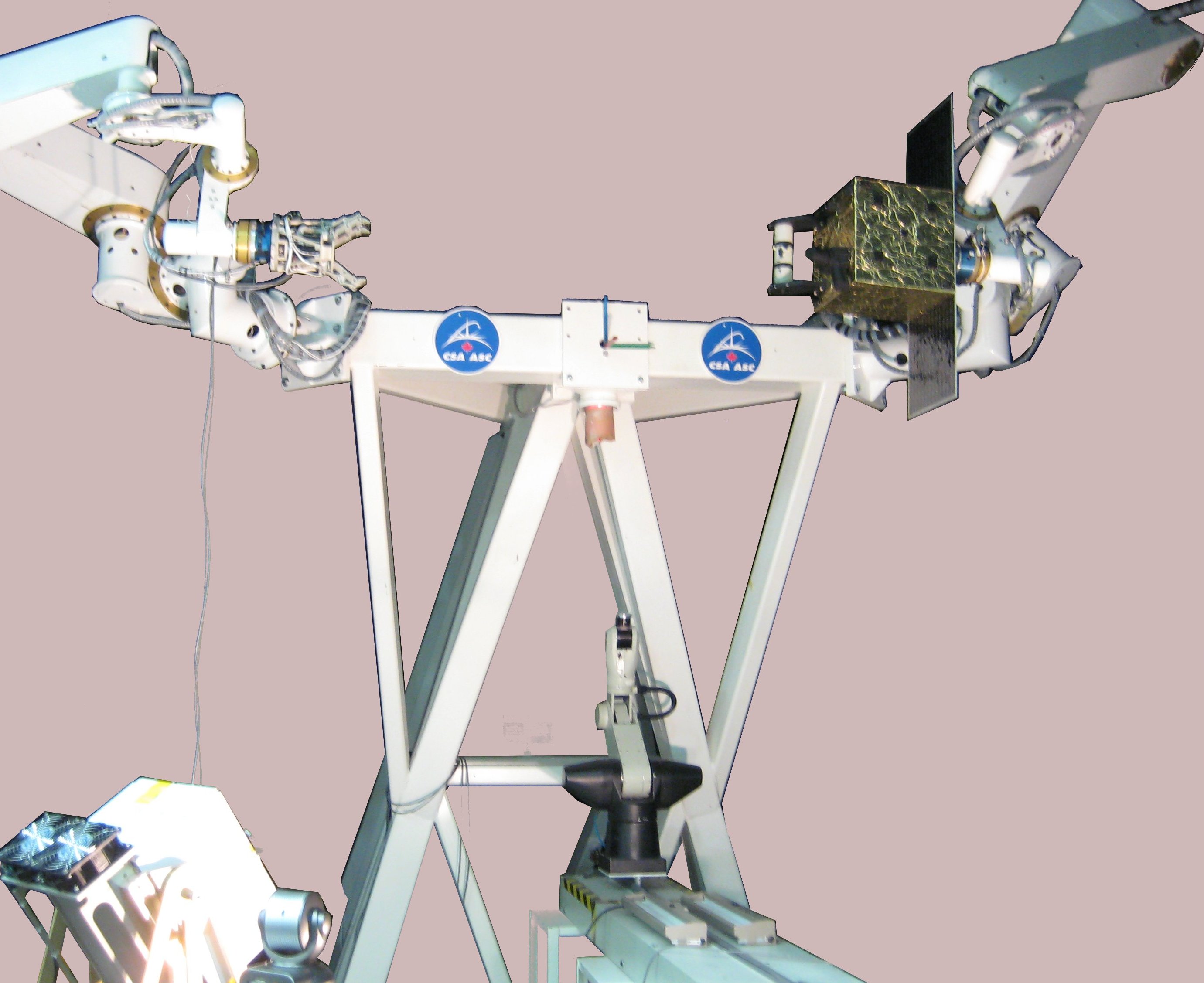
The Canadian Space Agency's (CSA) invention is an algorithm providing optimal control and estimation theory for planning the motion of a robotic manipulator to intercept a tumbling, non-cooperative target satellite with unknown dynamics. The unknown dynamics are obtained from a laser camera system enabling the robot to intercept the target at an optimal rendezvous. An optimal rendezvous ensures optimal alignment for robotic grasping such that the robot's grapple and the target's grapple fixture arrive at the rendezvous point simultaneously at the same velocity and proper respective angle. Furthermore, once the parameters have been established, grappling can be achieved "blind", meaning it is possible without additional assistance from the laser camera system. After grasping, the robot brings the grasped target to rest as quickly as possible subject to the constraint that the force/moment interactions between the robot and the object do not exceed their limits.
Commercial potential
- Inspection
- Life/efficiency extension
- Orbital maneuvers
- Debris removal
- Asteroid redirect mission
The business opportunity
The CSA's invention provides the opportunity to service a potentially larger number of recipient targets (e.g. free flyer and tumbling capture). This invention is complimentary to existing servicer technologies and given the invention's successful demonstration is more likely to encourage further development funding from interested parties (e.g. NASA and DARPA). The invention could be immediately tailored for the Phoenix project developed by DARPA, especially in relation to the servicer capturing the Payload Orbital Delivery System (PODS), NASA Asteroid Redirect Mission (ARM), Automated Rendezvous & Docking (AR&D) in space, orbital debris removal, servicing/rescuing failed satellites or providing continued support for an antenna "farm".
Development status
Ground-based testing has been successfully completed and recorded. Additional in-person viewing can be made possible through visitation to the CSA.
Commercialization status
The CSA is seeking preferred private Canadian partners who are interested in licensing the intellectual property or collaboratively exploring further applications of the technology.
Technology transfer details
A commercialization license for this technology is available.
The business opportunity may be referred to by its CSA case number: 51107
Publications
- Aghili, F., "Pre- and Post-Grasping Robot Motion Planning To Capture and Stabilize a Tumbling/Drifting Free-Floater with Uncertain Dynamics," IEEE International Conf. on Robotics & Automation, Karlsruhe, Germany, pp. 5441–5448, –.
- Aghili, F., "Active Orbital Debris Removal Using Space Robotics", Proc. of International Symposium on Artificial Intelligence, Robotics and Automation in Space i-SAIRAS , Turin, Italy, -.
- Aghili, F., "A Prediction and Motion-Planning Scheme for Visually Guided Robotic Capturing of Free-Floating Tumbling Objects with Uncertain Dynamics," IEEE Trans. on Robotics, Vol. 28, No. 2, pp. 634–649, .
- Aghili, F., Kuryllo, M., Okouneva, G., and English, C., "Fault-tolerant Position/Attitude Estimation of Free-Floating Space Objects Using a Laser Range Sensor," IEEE Sensors Journal , Vol. 11, No. 1, pp. 176–185, .
- Aghili, F., "Cartesian Control of Space Manipulators for On-Orbit Servicing," Proc. of AIAA Guidance, Navigation and Control Conference, Toronto, Canada, .
- Aghili, F., "Automated Rendezvous & Docking (AR&D) Without Impact Using a Reliable 3D Vision System," AIAA Guidance, Navigation and Control Conference, Toronto, Canada, .
- Aghili, F., "Coordination Control of Free-Flying Manipulator and Its Base Attitude to Capture and Detumble a Noncooperative Satellite," Proc. of IEEE/RSJ International Conference on Intelligent Robots & Systems, St. Louis, USA, pp. 2365–2372, .
- Aghili, F., Kuryllo, M., Okuneva, G., and McTavish, D., "Robust Pose Estimation of Moving Objects Using Laser Camera Data for Autonomous Rendezvous & Docking," Proc. of ISPRS Worksshop Laserscanning, Paris, France, pp. 253–258, .
- Aghili, F., "Optimal Control of a Space Manipulator for Detumbling of a Target Satellite," Proc. of IEEE Int. Conference on Robotics & Automation, Kobe, Japan, pp. 3019–3024, .
- Aghili, F. and Parsa, K., "Motion and Parameter Estimation of Space Objects Using Laser-Vision Data," AIAA Journal of Guidance, Control, and Dynamics, Vol. 32, No. 2, pp. 538–550, .
- Aghili, F. and Parsa, K., "An Adaptive Vision System for Guidance of a Robotic Manipulator to Capture a Tumbling Satellite with Unknown Dynamics," Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots & Systems, Nice, France, pp. 3064–3071, .
- Aghili, F., "Optimal Control for Robotic Capturing and Passivation of a Tumbling Satellite," Proc. of AIAA Guidance, Navigation and Control Conference, Honolulu, Hawaii, .
- Aghili, F. and Parsa, K., "An Adaptive Kalman Filter for Motion Estimation/Prediction of a Free-Falling Space Object Using Laser-Vision Data with Uncertain Inertial and Noise Characteristics," Proc.
- Aghili, F., Parsa, K., and Martin, E., "A Vision-Guided System for Robotic Capture of a Tumbling Satellite in Presence of Occlusion," Proc. of CISM-IFToMM Symposium on Robot Design, Dynamics, and Control, Tokyo, Japan, pp. 3–10, .
- Aghili, F., Parsa, K., and Martin, E., "Robotic Docking of a Free-Falling Space Object with Occluded Visual Condition," Proc. of 9th Int. Symp. on Artificial Intelligence, Robotics & Automation in Space, Los Angeles, CA, – .
- Aghili, F. and Parsa, K., "Adaptive Motion Estimation of a Tumbling Satellite Using Laser-Vision Data with Unknown Noise Characteristics," Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots & Systems, San Diego, CA, pp. 839–846, – .