
Servocommande visuelle prédictive pour la saisie et la stabilisation robotique d'objets spatiaux non coopératifs en culbutage
Contexte
Plusieurs organismes nationaux et internationaux, ainsi que des entreprises commerciales ont proposé l'entretien en orbite au moyen d'un télémanipulateur spatial pour réparer, rescaper, ravitailler et éliminer des satellites rendus inutilisables. On envisage un concept similaire pour toutes les missions d'entretien robotique et cela exige un bras robotique capable de saisir un satellite de façon sûre et sécuritaire, compte tenu de plusieurs contraintes opérationnelles et environnementales. Les satellites visés sont souvent en culbutage, ce qui complique davantage l'opération de capture robotique. On n'a encore jamais essayé de faire la capture robotique d'une cible en culbutage, malgré le fait que plusieurs missions ont déjà démontré qu'il est possible de capturer en orbite un engin spatial en vol libre à l'aide d'un bras robotique.
Avantages
- Faire une capture sûre et sécuritaire
- Prédire le culbutage
- Minimiser l'impact au moment du rendez-vous
- Déterminer le point optimal pour le rendez-vous afin d'éviter les collisions
- Effectuer une manœuvre d'élimination du culbutage en temps opportun, compte tenu des contraintes de force/moment
- Profiter d'un système robuste en matière d'occlusion visuelle
- Tirer profit des réussites éprouvées lors d'essais au sol
La technologie
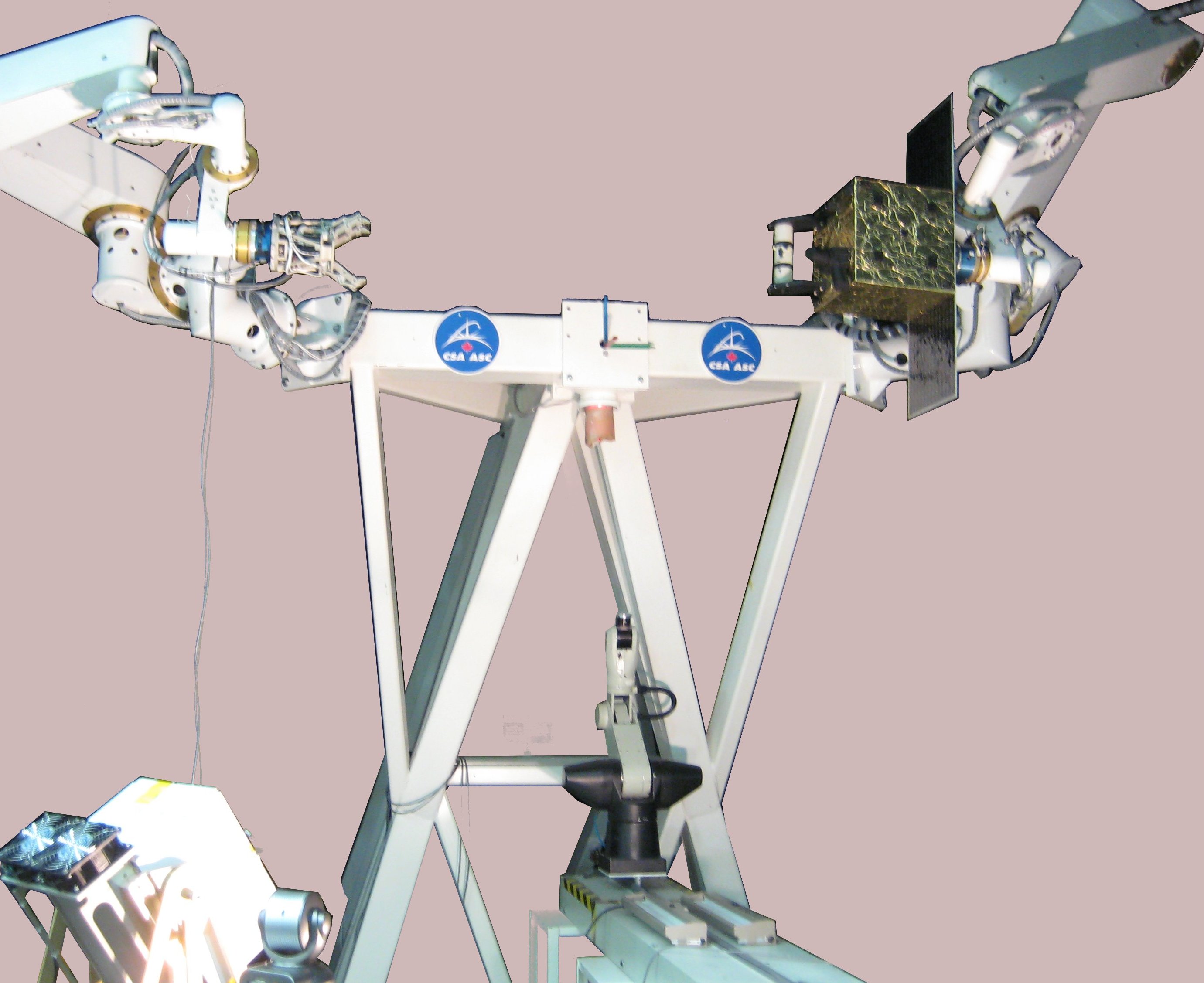
L'invention de l'Agence spatiale canadienne (ASC) est un algorithme qui offre un contrôle optimal et une théorie de l'estimation permettant de planifier les mouvements d'un télémanipulateur robotique pour intercepter un satellite cible non coopératif en culbutage dont la dynamique est inconnue. On obtient la dynamique inconnue à l'aide d'un système de caméra au laser qui permet au robot d'intercepter la cible à un point de rendez-vous optimal. Un rendez-vous optimal assure un alignement optimal pour la capture robotique, de façon à ce que le grappin du robot et le préhenseur-connecteur de la cible arrivent au point de rendez-vous en même temps, à la même vitesse et avec le bon angle respectif. De plus, une fois que les paramètres ont été établis, la préhension peut être effectuée « à l'aveugle », ce qui signifie qu'il est possible de mener l'opération sans autre aide du système de caméra au laser. Une fois la cible saisie, le robot immobilise cette dernière le plus vite possible, en s'assurant que les contraintes des interactions de force/moment entre le robot et l'objet ne dépassent pas les limites de ces derniers.
Potentiel commercial
- Inspection
- Prolongement de la vie utile/l'efficience
- Manœuvres orbitales
- Élimination des débris
- Mission de redirection d'astéroïde
Occasion d'affaires
L'invention de l'ASC pourrait donner l'occasion de faire l'entretien d'un grand nombre de cibles possibles (p. ex. grâce à la capture d'objets en vol libre ou en culbutage). Cette invention s'ajoute aux technologies d'entretien actuelles et, vu sa démonstration réussie, il est plus probable qu'elle favorise le financement d'autres travaux de développement de la part de parties intéressées (p. ex. la NASA et la DARPA). L'invention pourrait être adaptée immédiatement au projet Phoenix développé par la DARPA, tout particulièrement pour permettre la capture par le système d'entretien du système PODS (Payload Orbital Delivery System), ainsi qu'à la mission ARM (Asteroid Redirect Mission) de la NASA, le système d'amarrage automatique AR&D (Automated Rendezvous & Docking) dans l'espace, l'élimination des débris orbitaux, l'entretien/le sauvetage de satellites en panne ou le soutien continu pour un « parc » d'antennes.
État du développement
Les essais au sol ont été effectués et enregistrés avec succès. On peut aussi voir les résultats en personne en visitant l'ASC.
État de la commercialisation
L'ASC cherche des partenaires privilégiés canadiens du secteur privé qui souhaitent obtenir une licence pour utiliser cette propriété intellectuelle ou collaborer pour explorer davantage d'autres applications de cette technologie.
Détails sur le transfert de la technologie
Une licence de commercialisation est disponible pour cette technologie.
Numéro de dossier de l'ASC pour cette occasion d'affaires : 51107
Publications
- Aghili, F., « Pre- and Post-Grasping Robot Motion Planning To Capture and Stabilize a Tumbling/Drifting Free-Floater with Uncertain Dynamics », IEEE International Conf. on Robotics & Automation, Karlsruhe, Allemagne, p. 5441–5448, –.
- Aghili, F., « Active Orbital Debris Removal Using Space Robotics », Proc. of International Symposium on Artificial Intelligence, Robotics and Automation in Space i-SAIRAS, Turin, Italie, -.
- Aghili, F., « A Prediction and Motion-Planning Scheme for Visually Guided Robotic Capturing of Free-Floating Tumbling Objects with Uncertain Dynamics », IEEE Trans. on Robotics, vol. 28, no 2, p. 634–649, .
- Aghili, F., Kuryllo, M., Okouneva, G., et English, C., « Fault-tolerant Position/Attitude Estimation of Free-Floating Space Objects Using a Laser Range Sensor », IEEE Sensors Journal, vol. 11, no 1, p. 176–185, .
- Aghili, F., « Cartesian Control of Space Manipulators for On-Orbit Servicing », Proc. of AIAA Guidance, Navigation and Control Conference, Toronto, Canada, .
- Aghili, F., « Automated Rendezvous & Docking (AR&D) Without Impact Using a Reliable 3D Vision System », AIAA Guidance, Navigation and Control Conference, Toronto, Canada, .
- Aghili, F., « Coordination Control of Free-Flying Manipulator and Its Base Attitude to Capture and Detumble a Noncooperative Satellite », Proc. of IEEE/RSJ International Conference on Intelligent Robots & Systems, St. Louis, États-Unis, p. 2365–2372, .
- Aghili, F., Kuryllo, M., Okuneva, G., et McTavish, D., « Robust Pose Estimation of Moving Objects Using Laser Camera Data for Autonomous Rendezvous & Docking », Proc. of ISPRS Worksshop Laserscanning, Paris, France, p. 253–258, .
- Aghili, F., « Optimal Control of a Space Manipulator for Detumbling of a Target Satellite », Proc. of IEEE Int. Conference on Robotics & Automation, Kobe, Japon, p. 3019–3024, .
- Aghili, F. et Parsa, K., « Motion and Parameter Estimation of Space Objects Using Laser-Vision Data », AIAA Journal of Guidance, Control, and Dynamics, vol. 32, no 2, p. 538–550, .
- Aghili, F. et Parsa, K., « An Adaptive Vision System for Guidance of a Robotic Manipulator to Capture a Tumbling Satellite with Unknown Dynamics », Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots & Systems, Nice, France, p. 3064–3071, .
- Aghili, F., « Optimal Control for Robotic Capturing and Passivation of a Tumbling Satellite », Proc. of AIAA Guidance, Navigation and Control Conference, Honolulu, Hawaii, .
- Aghili, F. et Parsa, K., « An Adaptive Kalman Filter for Motion Estimation/Prediction of a Free-Falling Space Object Using Laser-Vision Data with Uncertain Inertial and Noise Characteristics » Proc.
- Aghili, F., Parsa, K., et Martin, E., « A Vision-Guided System for Robotic Capture of a Tumbling Satellite in Presence of Occlusion » Proc. of CISM-IFToMM Symposium on Robot Design, Dynamics, and Control, Tokyo, Japon, p. –.
- Aghili, F., Parsa, K., et Martin, E., « Robotic Docking of a Free-Falling Space Object with Occluded Visual Condition » Proc. of 9th Int. Symp. on Artificial Intelligence, Robotics & Automation in Space, Los Angeles, Californie, –.
- Aghili, F. et Parsa, K., « Adaptive Motion Estimation of a Tumbling Satellite Using Laser-Vision Data with Unknown Noise Characteristics », Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots & Systems, San Diego, Californie, p. 839–846, – .
Inventeur
- Date de modification :