
À propos de la base mobile

La base mobile fait partie de la contribution du Canada au programme de la Station spatiale internationale (SSI). C'est une plateforme de travail mobile et un poste de stockage. Elle peut transporter :
- le Canadarm2 et Dextre (ensemble ou individuellement);
- de l'équipement;
- des astronautes en sortie extravéhiculaire.

Le Canadarm2 est mis à contribution pour déplacer la base mobile en vue de son installation sur la SSI. (Source : NASA.)
Les robots de pointe Canadarm2 et Dextre ainsi que la base mobile (plateforme de transport et de stockage) sont la contribution du Canada à la Station spatiale internationale.
Ces trois éléments sont essentiels à plusieurs tâches de maintenance et aux activités courantes.
Le fonctionnement de la base mobile
Installée sur le transporteur mobile, la base mobile peut glisser sur un rail le long de la poutrelle centrale de la Station spatiale. Cela lui permet de se rendre à chacun des huit points de raccordement permettant son alimentation électrique et celle du Canadarm2 et de Dextre.
Lorsque le transporteur mobile et la base mobile doivent être déplacés, cette dernière, le Canadarm2 et Dextre sont mis hors tension. Ils sont rebranchés une fois que le transporteur mobile est verrouillé en place ailleurs sur la poutrelle, et le travail peut commencer.
Caractéristiques spéciales
La base mobile est dotée de quatre bornes électromécaniques, les points d'ancrage auxquels peuvent se fixer le Canadarm2 et Dextre. Elles fournissent l'énergie nécessaire aux robots et permettent la transmission de données et les connexions vidéo.
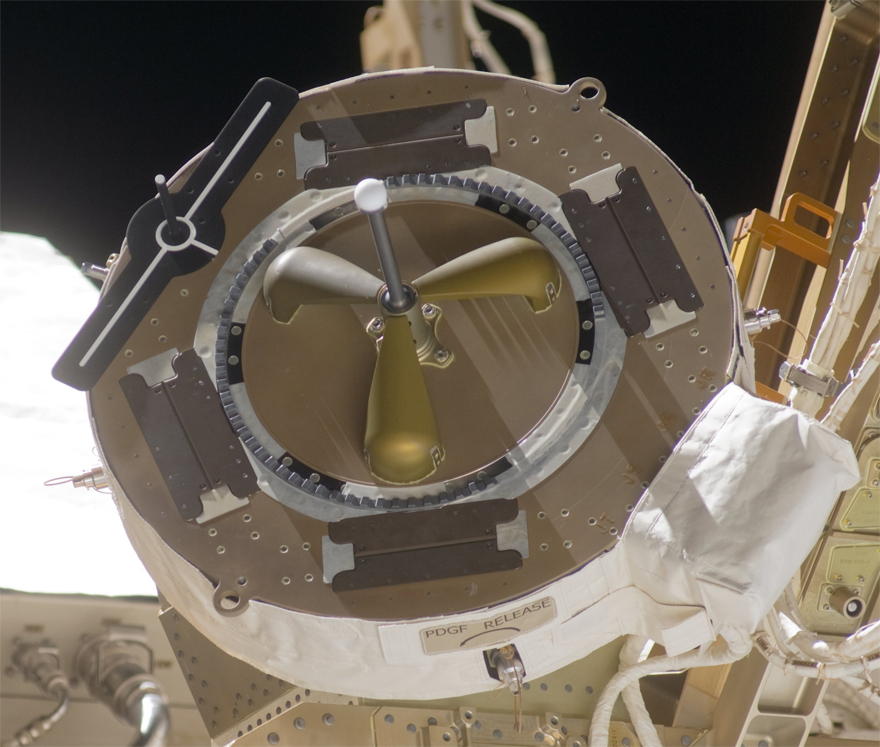
Une borne électromécanique. (Source : NASA.)
Qui commande la base mobile?
C'est l'équipe au sol de l'Agence spatiale canadienne (ASC) et celle de la NASA qui manœuvrent le transporteur mobile, sur lequel se trouve la base mobile.
Qui a construit la base mobile?
La société MacDonald, Dettwiler and Associates, de Brampton, en Ontario, a construit la base mobile, lancée vers la Station spatiale à bord de la navette Endeavour en .
Fiche technique
| Dimensions | 5,7 m x 4,5 m x 2,9 m |
|---|---|
| Masse | 1 584 kg |
| Puissance maximale (en service) | 825 W |
| Puissance minimale (pour rester fonctionnelle) | 365 W |

Poursuivez l'exploration
- Date de modification :