
Faire le plein dans l'espace : La Mission de ravitaillement robotique (RRM)
La Mission de ravitaillement robotique
L'Agence spatiale canadienne (ASC) a collaboré avec la NASA (en anglais seulement) à la Mission de ravitaillement robotique (RRM, pour Robotic Refueling Mission), une expérience qui s'est déroulée à l'extérieur de la Station spatiale internationale (SSI). La RRM a fait appel à Dextre, le robot polyvalent canadien sur la SSI, pour tester les technologies, les outils et les techniques susceptibles de convenir pour l'entretien et le ravitaillement de satellites en orbite. C'était la première fois que Dextre était utilisé pour un projet de recherche et développement. Cette mission s'inscrit dans une utilisation accrue de la station spatiale comme banc d'essai technologique.
Derniers événements
Depuis les premières opérations de ravitaillement robotique en , d'autres séries de tests ont été réalisées avec Dextre pour démontrer que le ravitaillement en orbite est possible, une capacité clé qui permettrait de prolonger la vie utile des satellites et d'autres engins spatiaux, en plus de favoriser une exploration spatiale durable.
- : Le robot canadien Dextre au centre d'opérations de détection d'une fuite et de démonstration de ravitaillement en carburant
- : Le robot canadien Dextre aidera à améliorer la capacité de ravitailler les satellites et les engins spatiaux en orbite
- : Tâche de transfert de carburant de Dextre : Le plein s'il vous plaît Robot!
Dextre, pompiste : La Mission de ravitaillement robotique
Dans cette vidéo, Mathieu Caron de l'ASC explique une phase de la RRM, dont le travail est le plus complexe jamais entrepris par un robot dans l'espace, au cours de laquelle Dextre a simulé le ravitaillement en éthanol liquide d'une maquette de satellite. (Source : ASC.)
Première expérience de R et D menée par Dextre pour tester les possibilités de ravitaillement des satellites par des robots
Le Centre spatial Goddard de la NASA a conçu un module et une trousse à outils dont Dextre s'est servi dans le cadre de la RRM. Lancé lors du dernier vol de la navette spatiale en 2011, le module cubique a la taille d'une machine à laver (environ 250 kg). Il comporte 28 pièces et éléments s'apparentant à ceux que l'on trouve généralement à bord d'un satellite : capuchons (qui font penser au capuchon du réservoir de carburant d'une voiture), buses, robinets et fils. Le module de la RRM abrite aussi quatre nouveaux outils (en anglais seulement) pour Dextre : un outil manipulateur de couverture à pinces coupantes, un outil multifonction, un outil pour retirer les bouchons de sécurité et un outil à buse. Les outils (de la taille d'un grille-pain) ont permis à Dextre d'effectuer diverses tâches, notamment couper les fils de verrouillage et le ruban de couverture du satellite simulé et enlever des couches d'isolant.
Pour cette mission, NASA et l'ASC ont mis sur pied une équipe de projet internationale regroupant des expériences vastes et variées. Des essais en vue de la préparation des opérations en orbite de la RRM ont été menés au Centre spatial Goddard et chez MDA Space à Brampton, en Ontario (anciennement MacDonald, Dettwiler and Associates Ltd. (MDA) et SPAR Aérospatiale, l'entrepreneur principal du Canadarm ainsi que du Système d'entretien mobile de l'ASC à bord de la station). Les opérations de la RRM à bord de la station spatiale ont été chorégraphiées et coordonnées par des équipes au sol internationales situées au Centre spatial Goddard à Greenbelt (Maryland), au Centre spatial Johnson à Houston (Texas), au Centre spatial Marshall à Huntsville (Alabama) et à l'ASC à Longueuil (Québec).
L'ASC entend maintenant faire progresser la robotique spatiale de pointe avec Canadarm3, la contribution du Canada au projet de la station lunaire Gateway. Cette station rendra possible la présence durable d'astronautes sur la Lune pour son exploration.
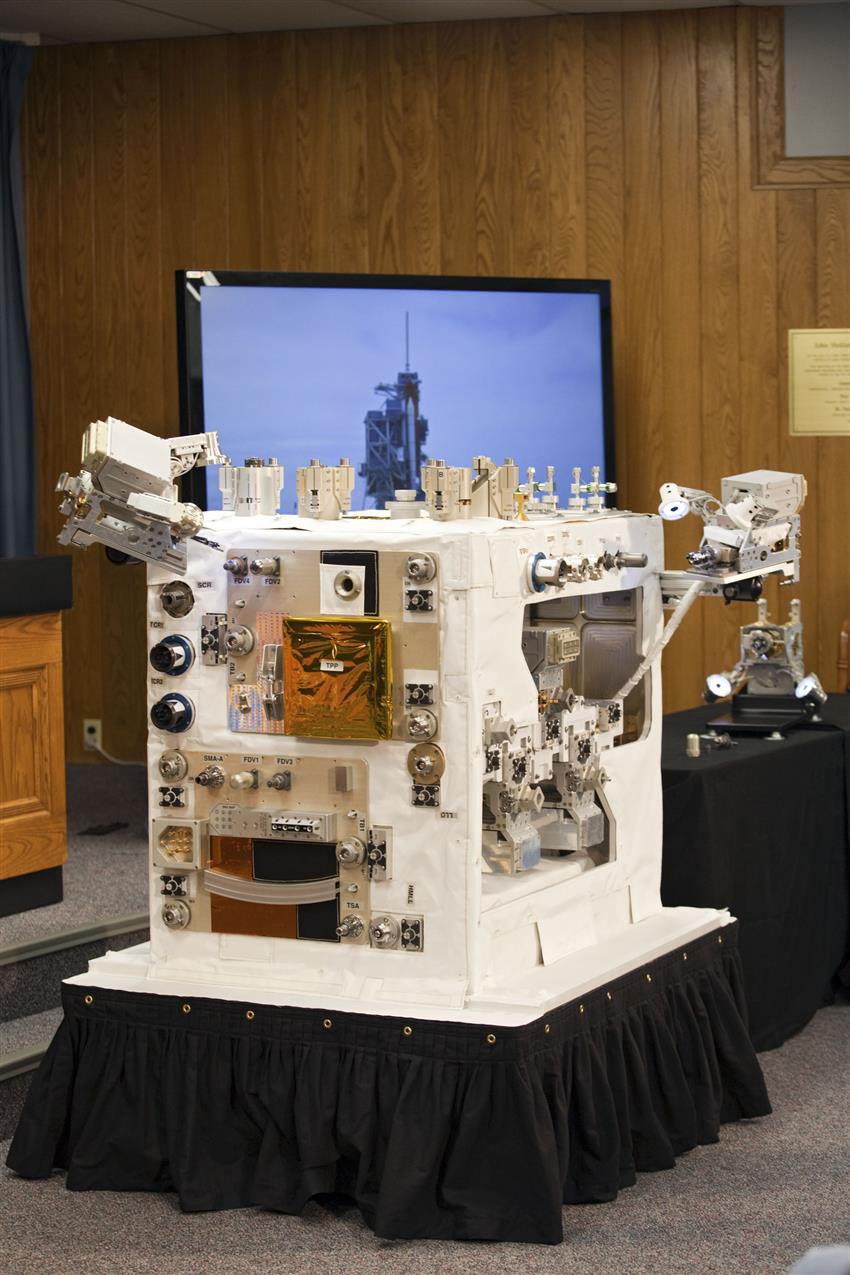
La boîte à outils et la boîte d'activités personnalisée pour la RRM sont de la taille d'une machine à laver (il s'agit d'une maquette sur la photo). Le matériel pour la RRM a été envoyé dans l'espace à bord du vol STS-135, le dernier de la navette spatiale. (Source : NASA.)
L'astronaute de la NASA, Mike Fossum, tient en mains la boîte de matériel pour la RRM tandis que le Canadarm2 l'approche de la plateforme de travail de Dextre. Une fois la mission STS-135 achevée, le Canadarm2 et Dextre installeront l'équipement pour la RRM sur la palette logistique Express 4 de la SSI. (Source : NASA.)

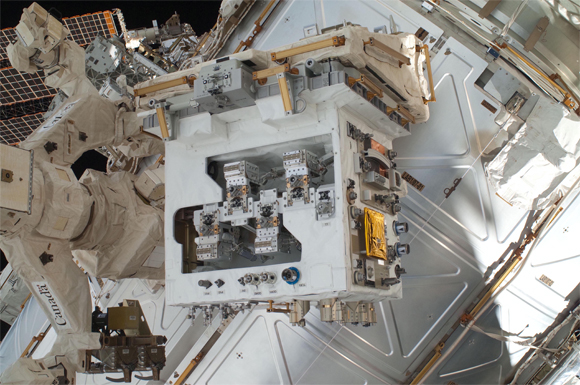
La boîte de matériel pour la RRM est installée sur la plateforme de travail de Dextre (au centre). L'astronaute de la NASA portant la combinaison spatiale avec les lignes rouges, Mike Fossum, (à gauche) est attaché au Canadarm2, le bras robotique de la SSI. L'astronaute dans la combinaison blanche, Ron Garan, (à droite) s'approche de Fossum pour l'aider à fixer l'équipement de la RRM sur l'un des bras de Dextre. (Source : NASA.)

Dextre a reçu les outils et la boîte d'activité qui lui serviront à réaliser son premier projet de recherche et développement, la RRM. (Source : NASA.)
Dextre (à gauche) avec le module de la RRM (au centre). (Source : NASA.)

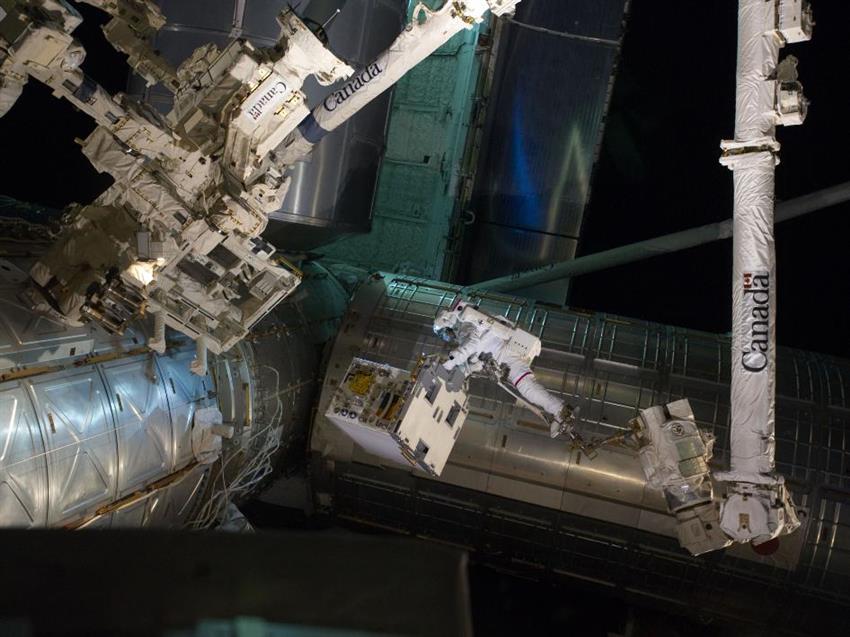
Fixé à l'extrémité du Canadarm2, Dextre installe le matériel de la RRM à bord de la SSI (palette logistique ExPRESS 4) le 2 septembre 2011. (Source : NASA.)

Vue en gros plan prise en mars 2012 par une caméra à faible résolution de la pince coupante noire utilisée par Dextre (non visible) pour couper le fil du capuchon exposé au milieu ambiant du module de la RRM. Cette tâche a été l'une des plus complexes de la mission, le dégagement étant d'environ un millimètre à peine. (Source : NASA/ASC.)

Gros plan de l'outil multifonction (à gauche) tenu par Dextre (non visible) s'approchant du tableau d'activités de la RRM en . (Source : NASA/ASC.)

Fixé à l'extrémité du Canadarm2, Dextre s'approche du module de la Mission de ravitaillement robotique (sur la plateforme inférieure, à gauche) pour procéder à la tâche associée aux verrous de retenue pour le lancement. (Source : NASA.)
Poursuivez l'exploration
- Date de modification :