
Le Canadarm2 : 20 ans de robotique spatiale canadienne à la Station spatiale internationale
Par Tim Braithwaite, Gestionnaire de liaison de l'Agence spatiale canadienne (ASC) (Houston)
Avant-propos
Le , un tout nouveau contrôleur de vol canadien descend par l'ascenseur jusqu'à la salle de contrôle de la Station spatiale internationale (SSI), située au premier étage du centre de contrôle de mission de la NASA à Houston. L'encre n'était pas encore sèche sur son attestation de qualification (agent de robotique [ROBO]) et sur celle de ses coéquipiers (agent des composants du système d'entretien mobile et agente des tâches du système d'entretien mobile), à l'étage dans la salle de soutien de la robotique. À compter de cette nuit-là et pour les quelques semaines à venir, représentant la pointe d'un énorme iceberg d'ingéniosité, d'efforts et d'expertise, deux Canadiens et un Américain seront les seuls contrôleurs de vol qualifiés chargés de la robotique de la Station… et ils avaient du pain sur la planche.
Deux nuits plus tard, en orbite autour de la Terre à 380 km d'altitude, l'équipage de la Station a déballé et assemblé le premier poste de travail de robotique dans le module laboratoire Destiny. Le Canadarm2 serait lancé dans un mois et les contrôleurs de vol ont eu le temps de vérifier le nouveau matériel. Cette nuit-là, ils n'avaient qu'un seul objectif : confirmer qu'un flux vidéo provenant d'une caméra de la navette spatiale – amarrée à la Station – apparaissait sur un écran du nouveau poste de travail de robotique de la Station. Il fallait faire cette étape simple, cruciale pour toutes les missions d'assemblage de robotique à venir, car elle n'avait jamais été réalisée auparavant.
Le Canadarm, le bras robotisé de la navette spatiale
L'arrivée du Canadarm2 à la Station s'inscrit dans une évolution qui remonte aux années . La participation canadienne au programme de la navette spatiale des États-Unis est née du désir de ce pays, après le programme Apollo, de travailler en collaboration dans le domaine des vols spatiaux habités. En , les États-Unis et le Canada ont signé un accord pour que le Canada développe un bras robotisé pour la navette spatiale américaine.
Le bras de la navette spatiale est devenu un programme du gouvernement canadien, dirigé par le Conseil national de recherches du Canada, avec Spar Aérospatiale (qui deviendra plus tard MacDonald, Dettwiler and Associates [MDA]) comme maitre d'œuvre. Selon les termes de l'accord, le Canada a développé et livré le premier bras, et la NASA s'en est procuré au moins trois autres auprès de l'équipe industrielle canadienne. L'équipe de Spar Aérospatiale a ensuite fourni un soutien technique durable pendant les 30 années du programme de la navette spatiale.

Le Canadarm dans l'espace lors de la mission STS-2 de la navette, le . (Source : NASA.)
Le premier Canadarm a été lancé à l'occasion du deuxième vol de la navette spatiale, STS-2, pour effectuer des tests sur le bras non chargé le . À l'atterrissage de la mission STS-135 en , le programme de la navette spatiale prenait fin près de 30 ans après avoir commencé : les Canadarm avaient appuyé plus de 60 missions de la navette.

Le Canadarm lors de STS-61, la première mission de maintenance du télescope Hubble. (Source : NASA.)
Outre l'assemblage de la SSI, ces missions ont permis d'assurer la maintenance du télescope spatial Hubble, de mettre en orbite et de récupérer des satellites, de déplacer des astronautes en sortie dans l'espace et d'effectuer des relevés critiques ainsi quelques tâches improvisées rendues possibles par la polyvalence du Canadarm – dont certaines ont démontré des capacités dont on n'avait jamais soupçonné avoir besoin dans le cadre du programme de la navette spatiale. Tout cela a jeté les bases de l'extraordinaire succès du Canadarm2.
Le Canadarm2 et le système d'entretien mobile
En , les États-Unis ont invité leurs alliés étrangers à se joindre à eux pour réaliser le programme de la SSI. Le succès du Canadarm sur la navette spatiale a naturellement mené à une étude sur la participation éventuelle du Canada à ce programme. Le premier vol de Marc Garneau à bord de la navette spatiale cette année-là a favorisé un climat encore plus favorable à l'égard de la participation canadienne. La contribution du Canada consisterait en une série de robots spatiaux pour l'assemblage et la maintenance de la Station. Le système d'entretien mobile comprendrait le Canadarm2, la base mobile, et Dextre, un robot agile à deux bras. Les accords officiels ont été signés le , le jour même où la navette spatiale a repris ses vols et mis fin à une interruption de deux ans et demi après l'accident de Challenger.
L'intention de créer l'ASC avait été annoncée dans le discours du Trône d'. La nouvelle agence a été créée le , date à laquelle les travaux de conception détaillée du système d'entretien mobile étaient déjà en cours avec Spar Aérospatiale comme maitre d'œuvre.
La nuit du , quand les contrôleurs de vol se trouvaient dans le centre de contrôle de mission de la NASA, 12 ans seulement s'étaient écoulés depuis le début de l'ASC.
Mission STS-100/ISS-6A : l'arrivée du Canadarm2
Lorsque le Canadarm2 a été lancé à bord de la navette spatiale Endeavour le , deux autres ROBO ainsi que les membres des équipes de soutien qu'ils allaient diriger avaient obtenu leur qualification. Trois équipes pouvaient désormais soutenir 24 heures sur 24 la mission en amarrage.

Le Canadarm2 arrive à la Station à bord de la navette spatiale Endeavour le . (Source : NASA.)
À bord d'Endeavour, il y avait non seulement le Canadarm2, mais aussi l'astronaute canadien Chris Hadfield. C'est lui qui est sorti dans l'espace – le premier Canadien à le faire – pour sortir le bras de sa palette de transport. Le vol comportait beaucoup d'autres éléments canadiens, notamment l'astronaute de l'ASC, Steve MacLean, qui a agi à titre d'agent de liaison « capcom
» dans la salle de contrôle de la navette. Du côté de la Station, Danielle Cormier (agente des tâches) et Tim Braithwaite (ROBO) – de la première équipe en mars – ont été rejoints par Sarmad Aziz (agent des systèmes) et six de leurs collègues américains. De plus, une équipe intégrée des services techniques et des programmes de l'ASC et de MDA a été déployée à l'ASC à Longueuil, au Québec, et au centre de contrôle de mission de la NASA à Houston.

L'équipe ROBO de la mission ISS-6A avec le directeur de vol principal. De gauche à droite : Danielle Cormier, Tim Braithwaite, Teri Rorabaugh, Michael Wright, Aaron Goldenthal (tenant la plaque de mission), Ian Mills, le directeur de vol John Curry, Sarmad Aziz. Absents : Ruch Deemer, Royce Renfrew. (Source : NASA.)
C'est le 22 avril qu'a eu lieu la première sortie dans l'espace de la mission, une étape importante pour le Canada et pour l'assemblage du bras en orbite. Dans la salle de contrôle de la navette et celle de la Station, Steve MacLean avait placé un drapeau canadien sur chaque console.

Chris Hadfield, au bout du Canadarm de la navette, installe le Canadarm2 le . (Source : NASA.)
Alors que la sortie dans l'espace était presque terminée, que Chris Hadfield était prêt à entrer dans le sas et que la Station survolait Terre-Neuve, Steve MacLean a fait jouer l'« Ô Canada
» sur la radio air-sol. Il a utilisé un enregistrement de Roger Doucet chantant l'hymne national avant un match des Canadiens au Forum de Montréal. On pense que c'est la première fois qu'un hymne national a été joué dans l'espace.

Le , Steve MacLean debout à son pupitre dans la salle de contrôle de la navette au moment où joue l'hymne national canadien. (Source : NASA.)
Vêtu d'un chandail de hockey olympique canadien, Steve MacLean était à son pupitre d'agent de liaison « capcom
» pour ce moment très canadien. En entendant la musique dans le système audio, Tim Braithwaite s'est levé à son pupitre de ROBO dans la salle de contrôle de la Station. Chris Hadfield, flottant à l'extérieur de la Station, a fait le salut militaire.

Chris Hadfield saluant l'hymne national canadien alors qu'il survole Terre-Neuve lors de la première sortie dans l'espace d'un Canadien le . (Source : NASA.)
Au bout du couloir du centre de contrôle de mission, le représentant du Bureau des programmes en temps réel de l'ASC, Bill Mackey, se trouvait au Centre de gestion de la SSI pour la NASA… et lui aussi était très occupé. En mars, il avait mis en place la console IPCanada (International Partner Canada) de l'ASC pour permettre de communiquer les questions programmatiques et techniques à l'équipe de direction de la NASA. Il a également contribué à la mise en place de l'équipe de soutien technique en temps réel de la robotique qui, au cours de cette mission cruciale, a accueilli d'autres experts en systèmes du maitre d'œuvre MDA.
Une fois les sorties dans l'espace terminées, le bras assemblé et fixé à la Station, les poignées de main ont été nombreuses et Bill a sorti les biscuits à l'érable. Cette tradition se poursuit toujours 20 ans plus tard pour souligner les grands évènements. Puis l'ordinateur de contrôle principal de la Station est tombé en panne. L'ordinateur redondant a pris le relai, mais a également planté… tout comme l'ordinateur redondant suivant. On a vite soupçonné que la dernière nouveauté de la Station – le Canadarm2 et tous ses logiciels complexes – était à l'origine du problème. Il s'est révélé par la suite que les ordinateurs de la Station ont tous lâché en peu de temps à cause de défaillances matérielles et logicielles simultanées. Le Canadarm2 a donc été mis hors de cause, mais l'équipe devait encore gérer la situation de ces défaillances multiples et achever la mission.

Une « poignée de main robotisée
» dans l'espace : le Canadarm2 remet sa palette de transport au Canadarm de la navette le . (Source : NASA.)

Chris Hadfield aux commandes du Canadarm de la navette pour la « poignée de main robotisée
» dans l'espace le . (Source : NASA.)
Malgré les perturbations, l'équipe a réussi à contourner les problèmes. Enfin, avec l'équipage de la Station aux commandes du nouveau bras robotisé depuis le module US Lab et Chris Hadfield dans la navette, la « poignée de main robotisée
» dans l'espace a eu lieu. Le Canadarm2, sur le module US Lab, a récupéré la structure dans laquelle il a été transporté jusqu'en orbite et l'a remise au bras robotisé de la navette, qui l'a mise dans la soute. Cette même palette de transport emportera Dextre dans l'espace sept ans plus tard. Endeavour s'est désamarrée de la Station le lendemain.

Le , le Canadarm2 manœuvre le sas américain Quest en vue de son installation sur la Station. (Source : NASA.)
Les opérations de robotique qui avaient commencé en mars par les vérifications des postes de travail ont rapidement atteint un nouveau niveau d'intensité en raison du processus complexe de mise en service du Canadarm2 – tout cela en vue de l'installation du sas américain Quest en juillet. C'est le premier des 34 nouveaux éléments manipulés par le Canadarm2 qui, avec le Canadarm de la navette, servira à construire la Station.
Partenariat de la SSI
La contribution du Canada au bras de la navette spatiale a été une bénédiction pour l'industrie canadienne et a créé des possibilités de vol pour les astronautes canadiens. Qui plus est, le Canada est devenu une agence spatiale partenaire à part entière – la première à se joindre aux États-Unis et à la Russie à la table du programme de la Station. D'autres contrôleurs de vol canadiens ont été ajoutés à mesure que l'équipe ROBO s'agrandissait, ce qui a établi un partenariat de travail bilatéral unique.

Le Centre de contrôle de la robotique de l'ASC à Longueuil. (Source : ASC.)
En quelques années, un centre de contrôle de la robotique a été aménagé au centre spatial John-H.-Chapman, à Longueuil, au sud de Montréal, pour les contrôleurs de vol canadiens, ainsi que des installations pour accueillir les équipes de soutien technique, de formation et d'exploitation des charges utiles de l'ASC et de MDA.
La recherche scientifique de l'ASC était axée sur la santé humaine et a bénéficié d'un partenariat avec les autres agences. Le précieux partenariat de l'ASC avec la NASA s'est traduit par un plus grand nombre de vols d'astronautes canadiens à bord de la navette spatiale ainsi que par des missions de longue durée à bord de la Station.
Évolution
Le fonctionnement du Canadarm2 et de Dextre a complètement changé depuis qu'ils se trouvent à la Station. Le concept initial des opérations du système d'entretien mobile était basé sur la façon dont le bras de la navette avait été utilisé, avec des astronautes aux commandes à chaque étape. Néanmoins, après des années d'efforts soutenus de la part de l'équipe élargie de la robotique, il est devenu possible de commander le bras depuis le sol. Les contrôleurs de vol peuvent ainsi faire fonctionner le système d'entretien mobile depuis le sol la plupart du temps, ce qui permet aux astronautes de se concentrer sur la recherche scientifique. Cette nouvelle capacité essentielle a été conçue et réalisée alors que le bras était déjà dans l'espace. Le Centre de contrôle de la robotique de l'ASC prend en charge plus de 100 jours d'opérations par an, tandis que le Centre d'exploitation et d'ingénierie de Longueuil fournit depuis un soutien technique en temps réel chaque fois que le bras est utilisé. En collaboration avec ses partenaires américain et japonais, l'ASC a également rendu possible d'attraper des vaisseaux-cargos en vol libre. En , le Canadarm2 en aura attrapé 44 depuis la première fois (vaisseau-cargo japonais HTV-1) en .

Le Canadarm2 attrape le premier vaisseau-cargo en vol libre de la Station, le HTV-1 du Japon, en . (Source : NASA.)
D'autres améliorations, inspirées par le travail réalisé à la Station, ont rendu le système beaucoup plus robuste. Comme pour la navette spatiale des dizaines d'années auparavant, la présence d'un bras robotisé à la Station a permis de lui découvrir une nouvelle polyvalence et des capacités dont on ne soupçonnait pas l'existence. Que ce soit pour fournir du soutien robotisé imprévu pour les charges utiles externes ou encore pour répondre au nombre croissant d'activités de maintenance de la Station, l'utilisation des robots canadiens n'a cessé d'augmenter. En , l'équipe conjointe canado-américaine de contrôleurs de vol a fait fonctionner le système d'entretien mobile pendant 170 jours et lui a envoyé plus de 100 000 commandes. Le Canadarm2 a été tellement utilisé que ses effecteurs de verrouillage (ses « mains
») ont fini par s'user après avoir dépassé largement leur durée de vie nominale. Des astronautes sont sortis dans l'espace pour remplacer ces pièces. C'était là la preuve qu'on pouvait assurer la maintenance du système. Pour y arriver, il a fallu consentir des efforts considérables sur le plan logistique pour gérer et remettre à neuf les pièces de rechange acheminées de la Station au sol et vice versa.

Remplacement d'un effecteur de verrouillage du Canadarm2 en . (Source : NASA.)
Chaque étape importante et chaque amélioration du système a exigé un travail énorme de la part des équipes de l'ASC et de MDA chargées du matériel, de la logistique, des logiciels, des produits de vol et de l'analyse, le tout sous la direction du programme de la Station de l'ASC. L'équipe d'exploitation en temps réel dans les centres de contrôle de la NASA et de l'ASC ne représente que la pointe d'un iceberg qui s'étend de Houston à Montréal en passant par Toronto et au-delà.
Alors que commence la troisième décennie d'exploitation du système d'entretien mobile, le Canada développe actuellement le fonctionnement autonome de ses robots de la Station. Cette autonomie deviendra la base des conceptions et des opérations futures. L'ASC, MDA et le système robotisé canadien lui-même ont évolué depuis leurs débuts. L'environnement d'exploitation dynamique et constant du programme de la SSI est à l'origine d'une grande partie de cette évolution. L'ASC et ses partenaires de l'industrie ont élevé les capacités canadiennes en robotique à de nouveaux sommets.
Épilogue
Le , 15 ans après le premier quart de travail de l'équipe ROBO au pupitre de commande, l'astronaute de la NASA et commandant de la Station, Tim Kopra, a appelé de l'espace pour transmettre un message de félicitations à l'occasion du 15e anniversaire de la première équipe ROBO qualifiée en :
« J'aimerais prendre un petit moment pour souligner un anniversaire qui aura lieu demain, l'anniversaire du tout premier quart de travail de l'équipe ROBO dans le centre de contrôle de mission »
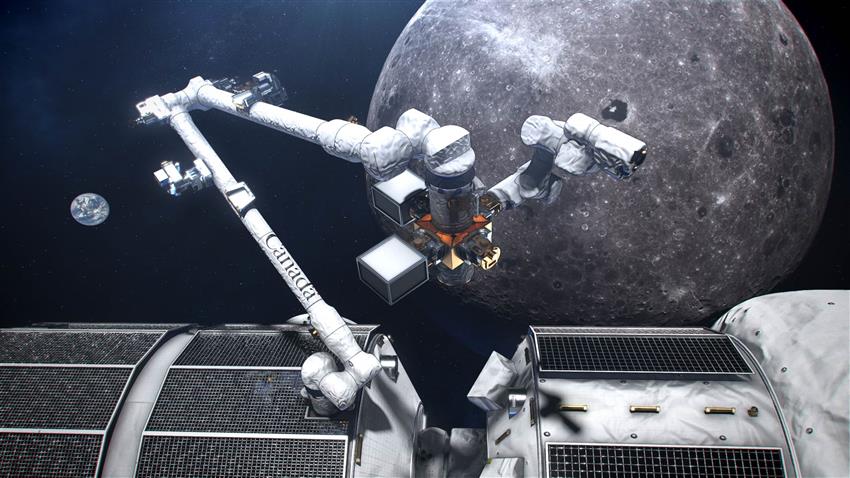
Concept du Canada pour le Canadarm3 destiné à la station Gateway en orbite lunaire. (Sources : ASC, NASA.)
Bond de cinq ans dans le temps : . Désormais retraité de la NASA, M. Kopra est maintenant vice-président de la robotique et des opérations spatiales chez MDA.
L'histoire des Canadarm est en évolution constante. Elle a commencé dans les années avec la conception du Canadarm pour la navette spatiale et s'est poursuivie pendant 20 ans avec les exploits du Canadarm2 à la Station. Elle se poursuivra maintenant dans l'avenir. Le Canada a été le premier pays à annoncer sa collaboration avec les États-Unis au projet de la station spatiale lunaire Gateway. Il fournira un système robotisé de nouvelle génération, le Canadarm3. L'ASC, toujours en collaboration avec MDA, définit les exigences du système en se basant sur les leçons apprises et l'expérience acquise à la Station. Tout notre savoir-faire, combiné à la technologie du 21e siècle, permettra d'envoyer des robots spatiaux canadiens beaucoup plus loin de la Terre, des robots dont les capacités auraient été inimaginables au moment de la conception du premier Canadarm.
Poursuivez l'exploration
- En photos : 20e anniversaire du Canadarm2 à la Station spatiale internationale
- Fiche comparative – Canadarm, Canadarm2 et Canadarm3
- À propos du Canadarm3
- Date de modification :